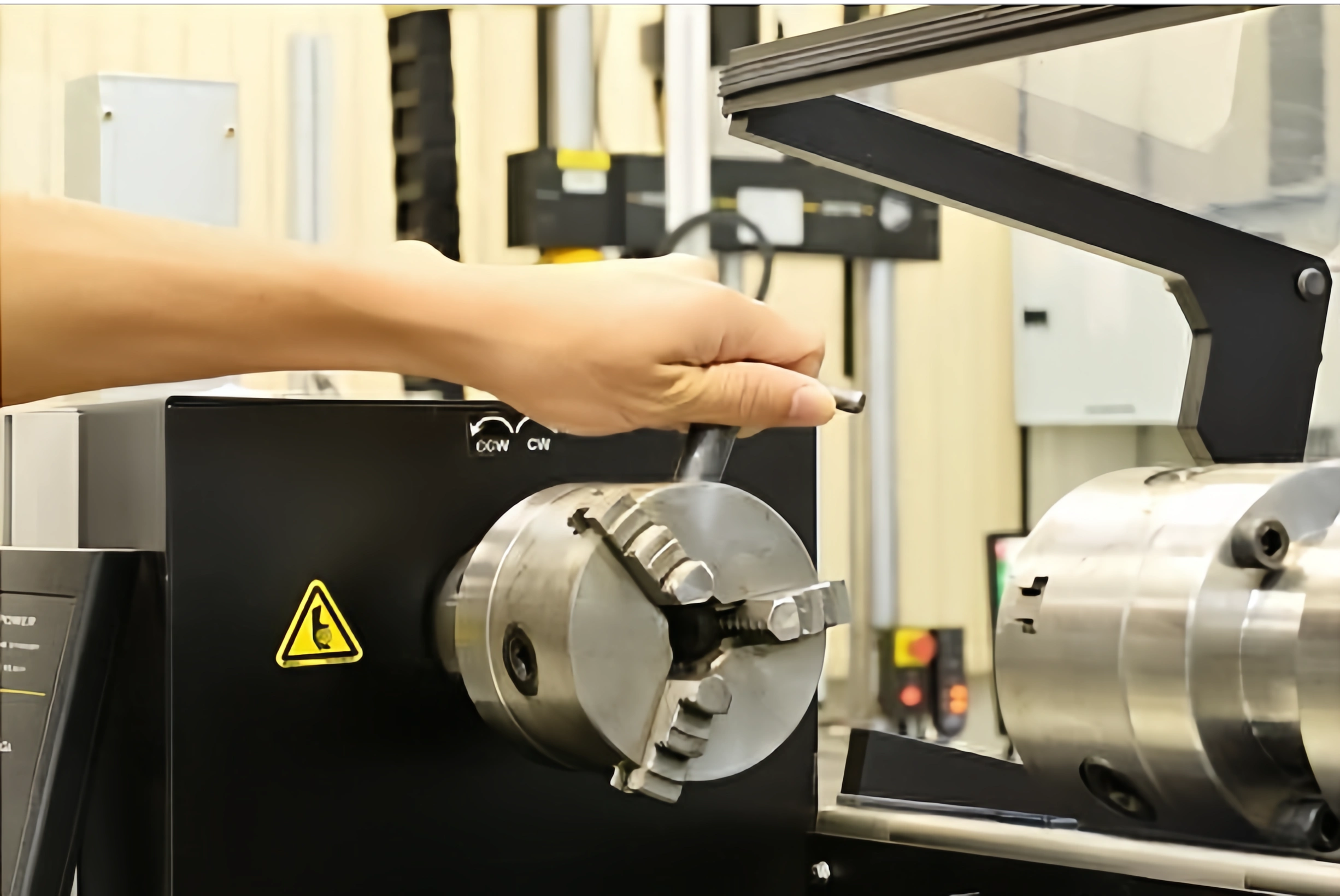
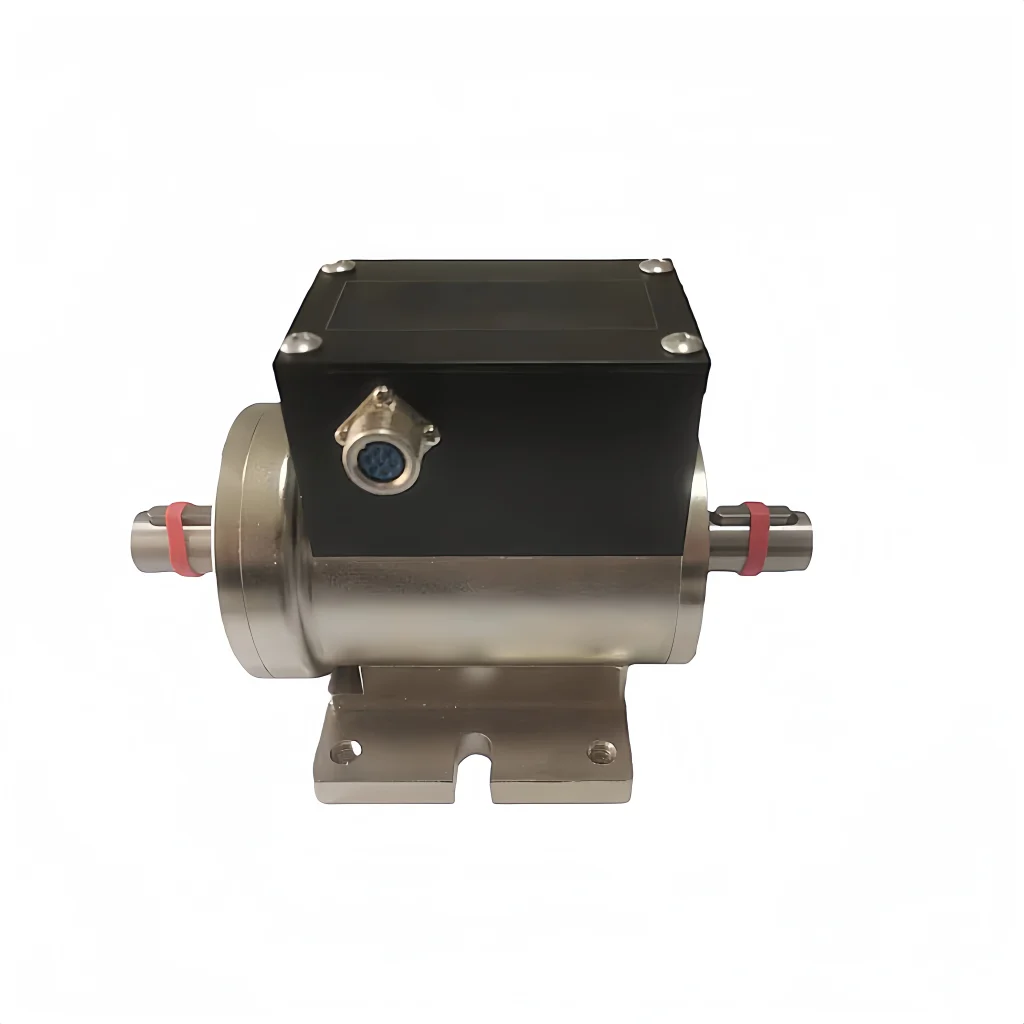
A force torque sensor, also known as a torque transducer, is an instrument used to measure the torque applied to an object. It converts the measured torque into an electrical signal. The electrical signal is then processed and displayed by a computer. A Force Torque Sensor can be categorized as a static or dynamic torque sensor. Static torque sensors measure torque during discontinuous rotation (<360°). While dynamic torque sensors measure torque during continuous rotation (>360°). They can sense torsional forces on many rotating or non-rotating mechanical components, typically measured in N·m.
Advantages:
- Customization available;
- Good reliability;
- High accuracy;
- Long life;
- Fast frequency response.
Disadvantages:
- High cost;
- Highly susceptible to environmental influences;
- Nonlinear error;
- Complex installation.
Based on our years of experience supplying torque sensors, we have concluded that torque sensors are primarily used in the following areas:
- Torque control of robot joints;
- Measurement of output torque and power of rotating power equipment such as motors, engines, and internal combustion engines;
- Also used for torque and power measurement of locomotives, automobiles, tractors, aircraft, ships, mining machinery, and other equipment;
- Used in the manufacture of viscometers;
- Used for measuring torque and power of equipment such as fans, pumps, gearboxes, and torque wrenches;
- Used for measuring the torque and power of sewage treatment systems;
- Used in laboratories, testing departments, and for production monitoring and quality control.





Managing the physical contact between the robot and the environment is crucial in robotic manipulation tasks. Due to the complexity and uncertainty of robotic systems, pure motion control is often insufficient. Even the most accurate models cannot fully predict all possible scenarios.
When a robot interacts with its environment, contact force is necessary. Excessive contact force can damage the object in contact. Insufficient contact force can hinder the robot from completing its task. So, precise control of contact force is important for the smooth functioning of a robot.
The invention of torque sensors is to solve the problem of the contact force between robots and the environment. Torque sensors can control the amplitude and accuracy of robot movement. By feedback the force, the robot can sense the contact force between itself and the object in real time and adjust its motion. Torque sensors can proactively adjust the robot’s interaction with the environment to ensure that contact force remains within an acceptable range.
The Function of Torque Sensors for Robots
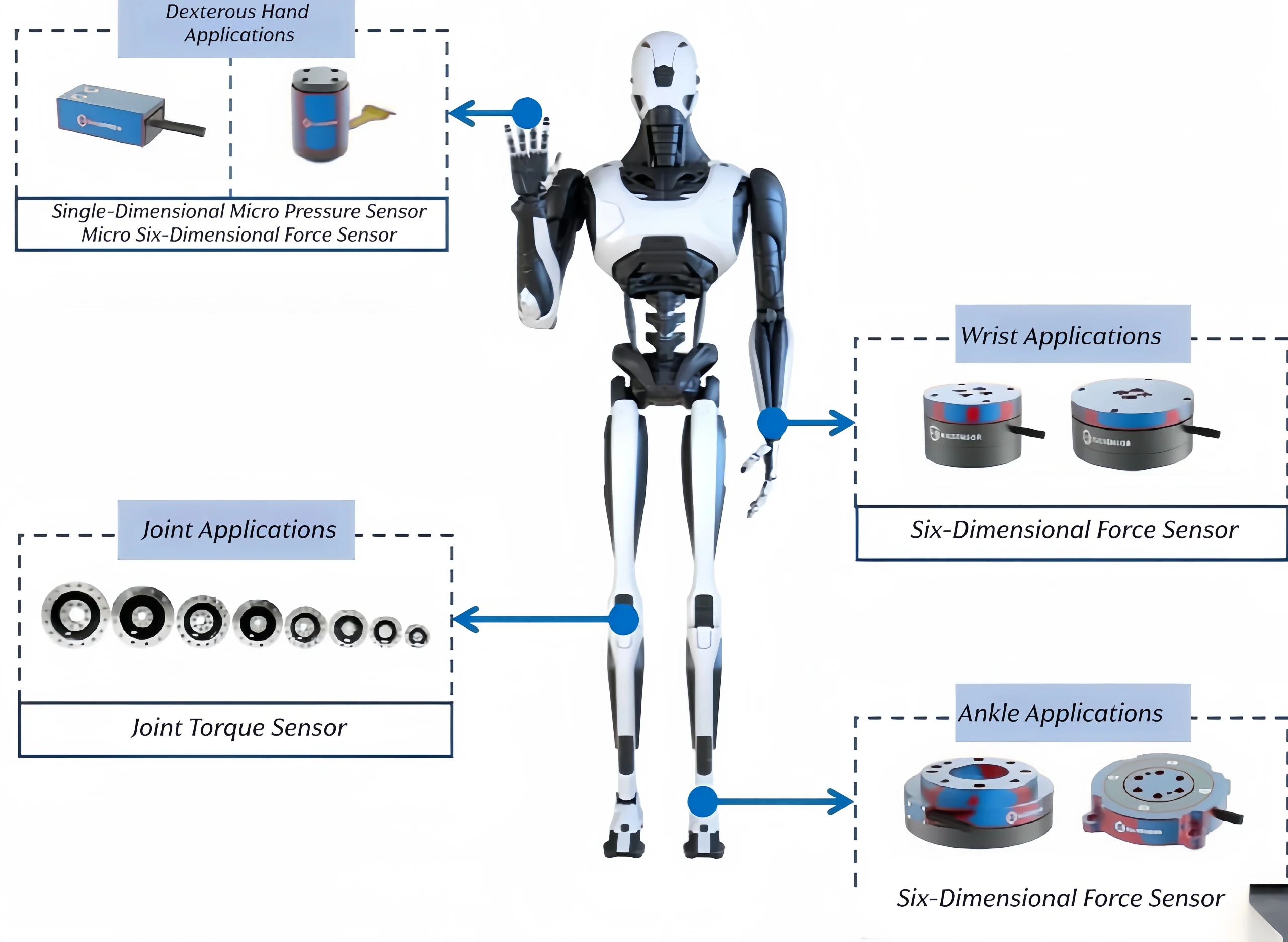
Torque sensors are installed on the joints or end-effectors of a robotic arm end effector.
Main functions include:
Torque sensors measure the torque, thrust, and torque acting on the robotic arm’s end effector in real time, providing precise feedback. They are right for performing complex force control tasks, such as precision grasping, assembly, and loading, preventing operational errors or damage caused by excessive torque.
By monitoring abnormal torque and force, torque sensors can accurately identify collisions or contact between a robotic arm and an object. By sensing the magnitude of the force, the robot can take appropriate protective measures. For an application requiring high-precision motion control, such as precision assembly and welding, the right feedback provided by torque sensors helps robotic arms accurately control position and force.
Read More about: Robot Torque Sensor Guide
How accurate is a force torque sensor?
Torque sensors are classified into accuracy levels of 0.1, 0.2, 0.5, 1, and 2. Grade 0.1 is the highest accuracy, with an error range of less than 0.1%. Grade 2 offers the lowest accuracy, with an error range of less than 2%. Different accuracy levels are suitable for various measurement scenarios. And users can select the appropriate accuracy based on their different needs.
How does a reaction torque sensor work?
Strain gauge torque sensors are the most common type. They utilize a semiconductor device—a resistance strain gauge—attached to an elastic shaft to sense the tiny deformations of the shaft caused by torque. This deformation causes the strain gauge's resistance to change, which is then converted into an electrical signal through a bridge circuit.
How do I calibrate a torque sensor?
Torque calibration can be performed statically or dynamically.
The progress for static calibration is as follows:
First, we need to prepare a standard torque source, a high-precision measuring instrument (such as an electronic scale or high-precision resistor), and a calibration fixture. It is necessary to ensure that all equipment is calibrated and in good condition.
We install the torque sensor on the calibration fixture, which ensures it is securely mounted. The axis of the torque sensor is aligned with the axis of the standard torque source.
Always warm up the sensor according to the sensor manual until it reaches a stable state. If any problems arise, consult a qualified technician.
Under no-torque conditions, the sensor output is adjusted to zero or a preset reference value.
Using a standard torque source, we slowly apply torque to the sensor at predetermined values. After each torque application, we should wait for the torque sensor to output a stable torque value and record the data.
The recorded torque value is compared with the reference torque value. Then, we create an error curve. Based on the error curve, we adjust the torque sensor's parameters (such as zero point, sensitivity, and linearity) until the required error accuracy is achieved.
If the measurement result is still wrong, we must repeat the above steps. This repetition is necessary for the stability and reliability of the calibration results.
If you meet any problems during the calibration process, please feel free to contact our engineers and technicians. Sino-Inst has been providing torque supply for over 20 years. We have professional engineers who can help you solve any problems you may have.
Here are dynamic calibration considerations:
Dynamic calibration is more complex than static calibration. We need to consider multiple factors, such as the sensor's dynamic response characteristics, vibration interference, and temperature changes. During dynamic calibration, it is often important to simulate actual operating conditions, such as speed and load variations. Dynamic calibration typically requires a dedicated laboratory or a site equipped with the necessary equipment and technical support.