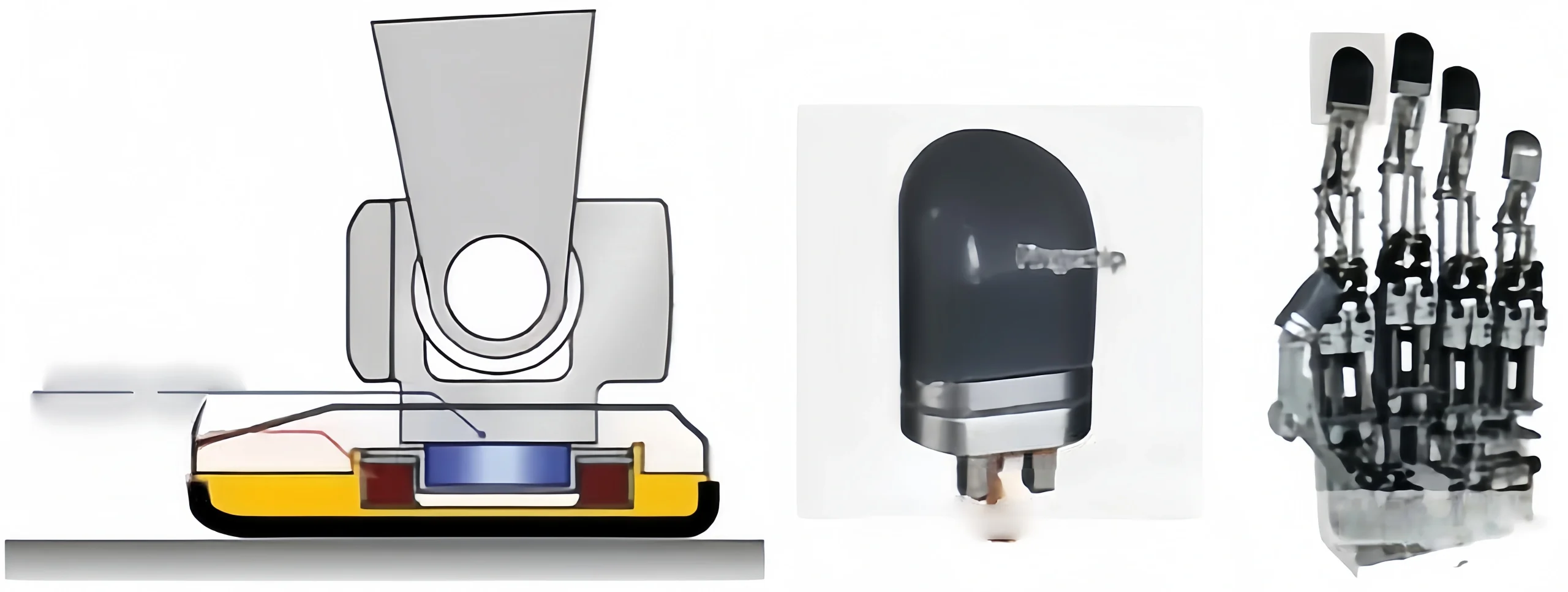
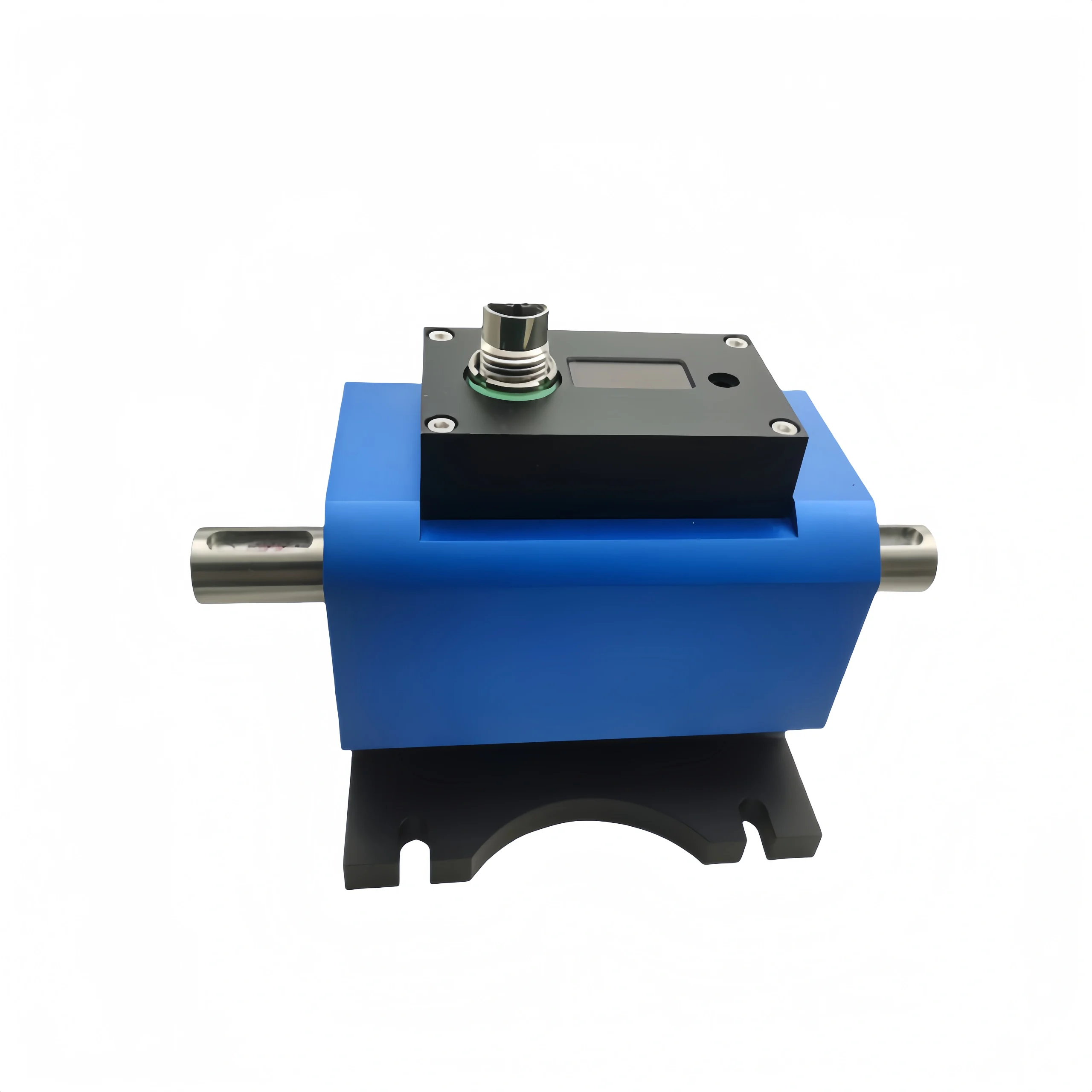
A robot torque sensor is a device that measures the torque applied to a robot. And it converts torque into a usable output signal. It primarily consists of the body unit and the strain/deformation detection system. The core principle of a robot torque sensor is to convert deformation caused by applied force into a signal.
When force is applied, it acts upon the sensor’s body unit. Inducing strain or deformation within it. The detection system senses this strain or deformation. And converts it into a corresponding voltage through circuitry. The measured voltage value characterizes the corresponding torque value. And the torque value is converted into a corresponding output signal.
Advantages:
High Accuracy:
The normal accuracy of ±0.1% FS. Some high-precision models even reach ±0.05% FS. As precision measurement tools, they accurately measure various torques, rotational speeds, and mechanical power.
Exceptional Stability:
Certain customized static torque sensors from Sino-Inst maintain hourly drift within ±0.01% of full scale, with zero drift values confined to an extremely small range.
Wide Measurement Range:
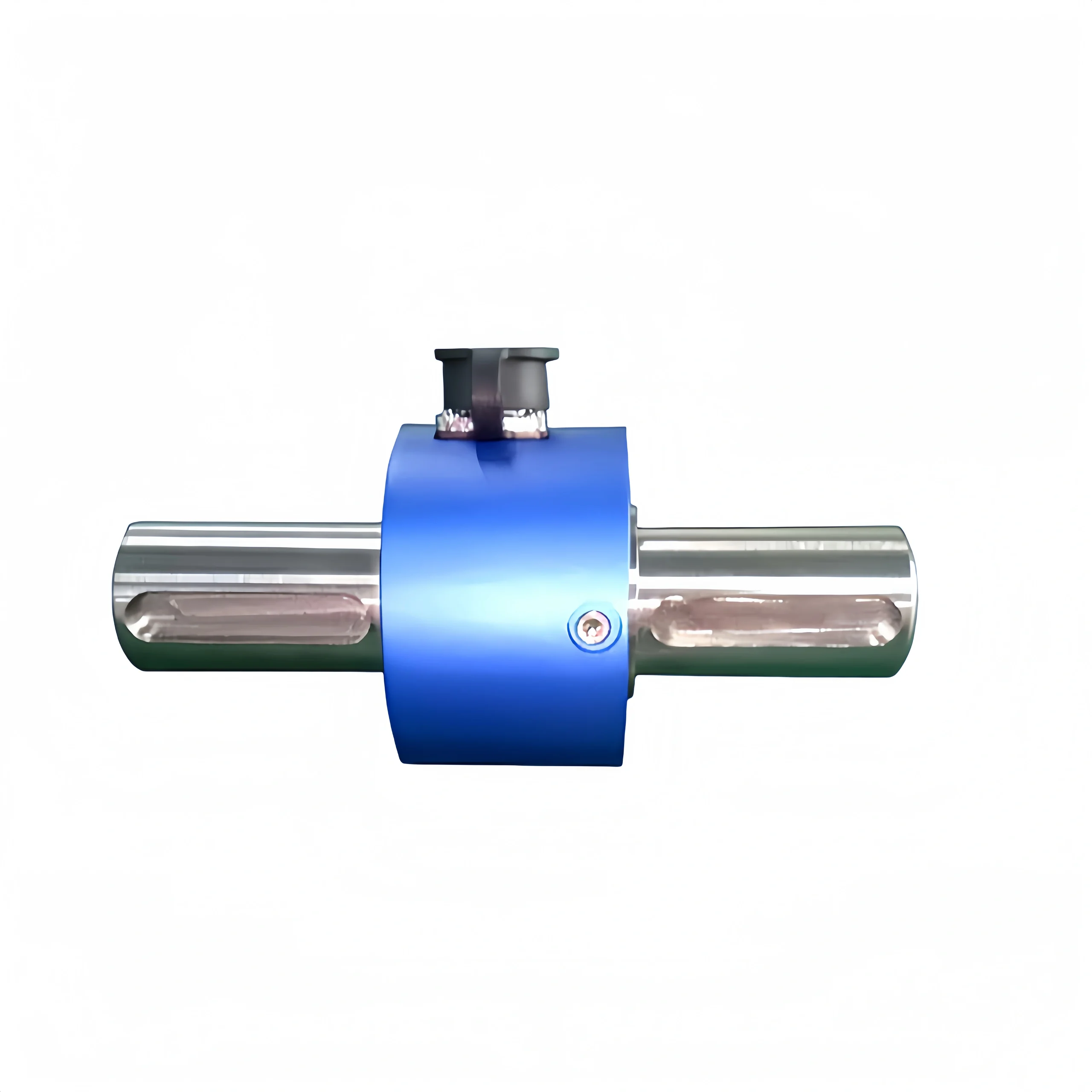
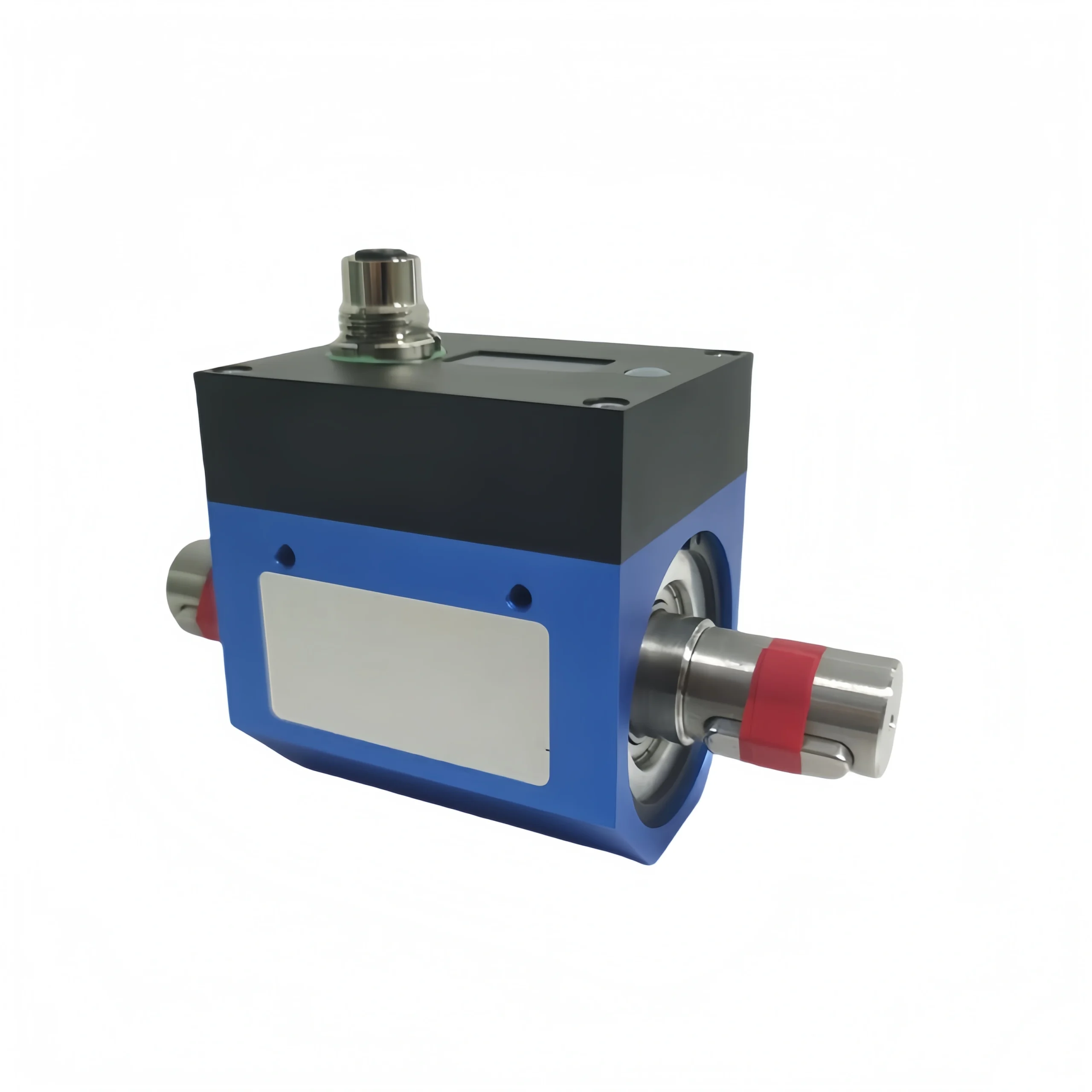
Robotic torque sensors feature a broad measurement range with customizable capacity. Certain models incorporate high-temperature and vibration-resistant designs to accommodate wider measurement spans. Normal measurement ranges span from 0 Nm to 100 kNm.
Easy Installation and Versatile Applications:
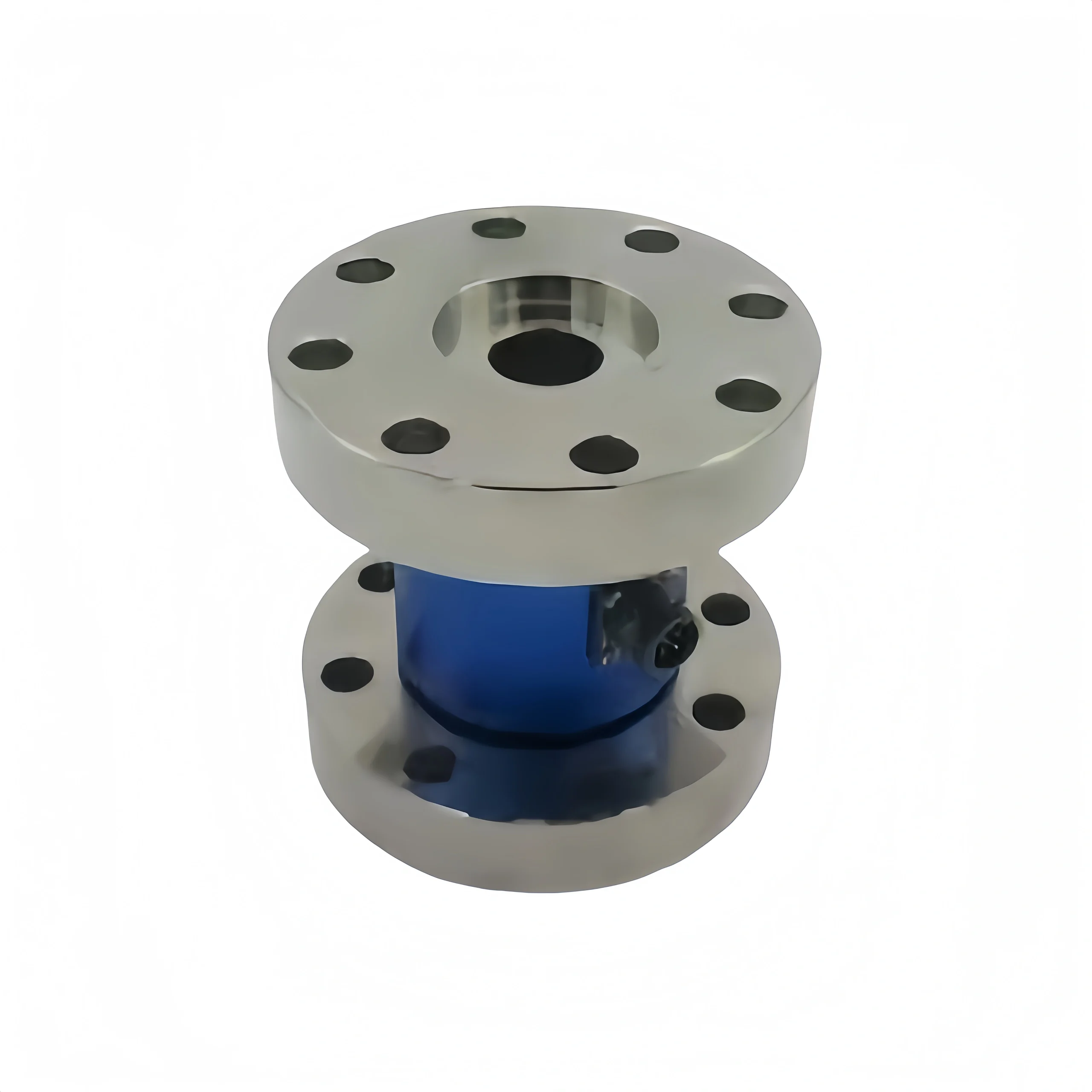
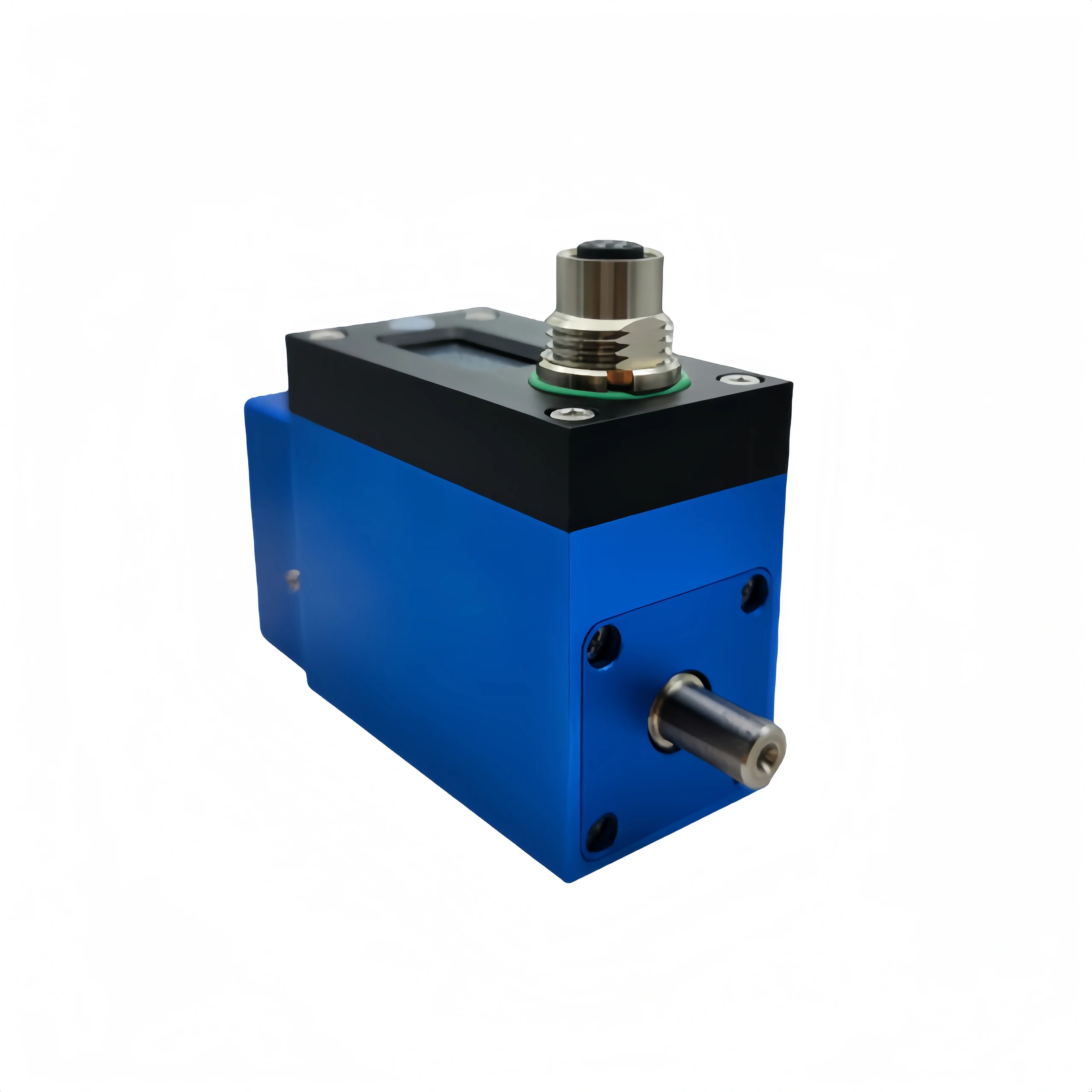
Robots’ torque sensor features compact, lightweight, and simplified structural designs for straightforward installation. Torque sensors operate independently of auxiliary instruments. Torque sensors accommodate torque measurement and control for many robotic systems.
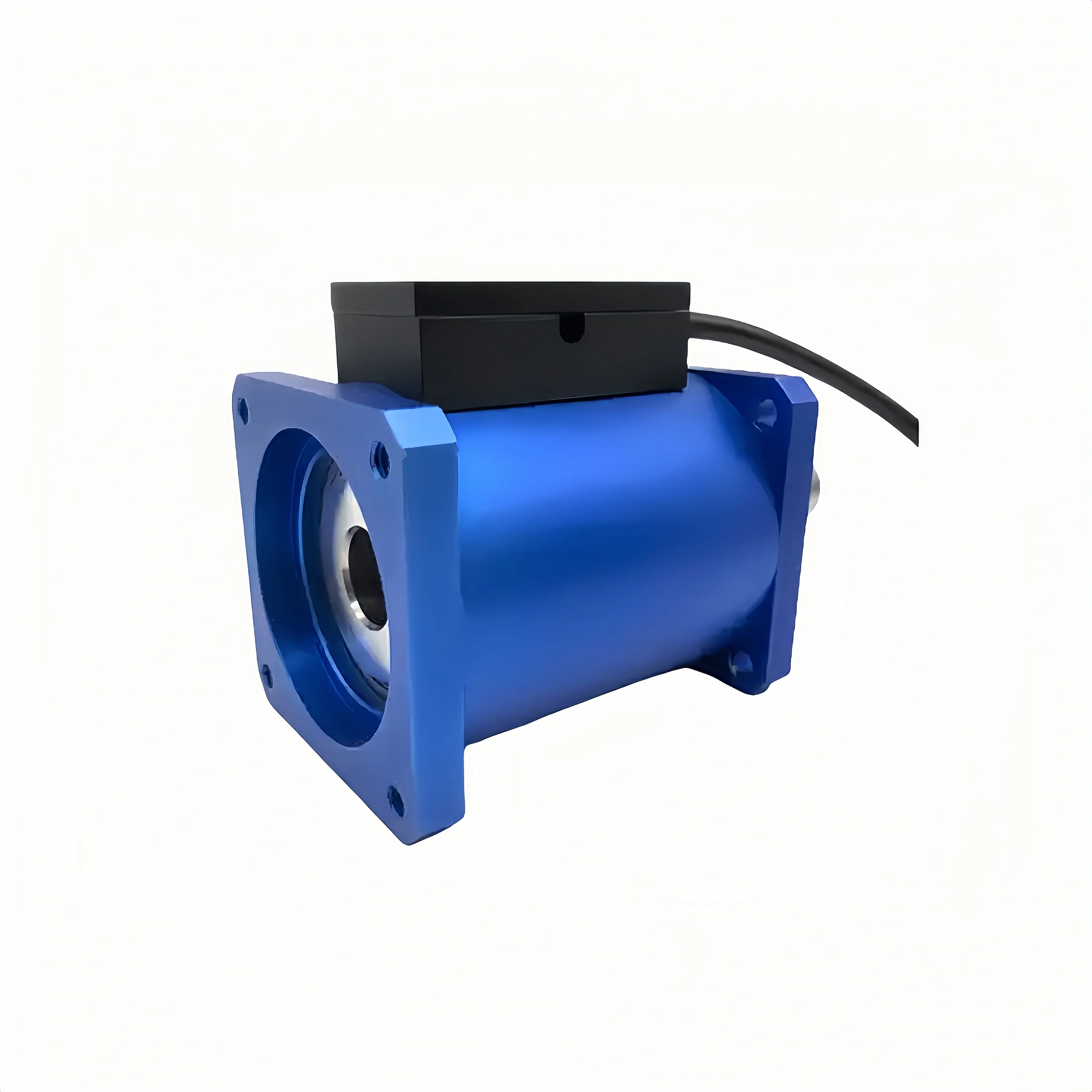
Various signal output types:
Output signals can be customized for your special requirements. Optional signal output includes 4-20mA, 0-10V, RS-485, and Hart, etc. It is suitable for long-distance transmission or anti-interference requirements.
Robotic torque sensors are primarily used for torque control in robot design.
Balancing while walking poses a significant challenge for humanoid robots. Torque sensors installed on leg joints continuously monitor ground reaction forces and joint stress states. It enables real-time adjustments to gait and center of gravity. They can perform flexible actions like autonomously standing up after a fall with a torque sensor. These sensors allow robots to maintain stability on complex terrain.
During grasping actions, torque sensors continuously monitor the force applied by the gripper. Precise torque data prevents objects from slipping due to insufficient force. It can also avoid damage from excessive force.
For example, during the grasping process, the torque sensor transmits torque to the control system within milliseconds. Accurate torque data enables the robot to flexibly adjust its grasping force. It achieves precision control approaching human tactile sensitivity.
Torque sensors are typically required at each joint of industrial and collaborative robots. This enables robots to execute tasks with greater precision while preventing self-damage. Robotic torque sensors ensure the stability and safety of robotic operations.





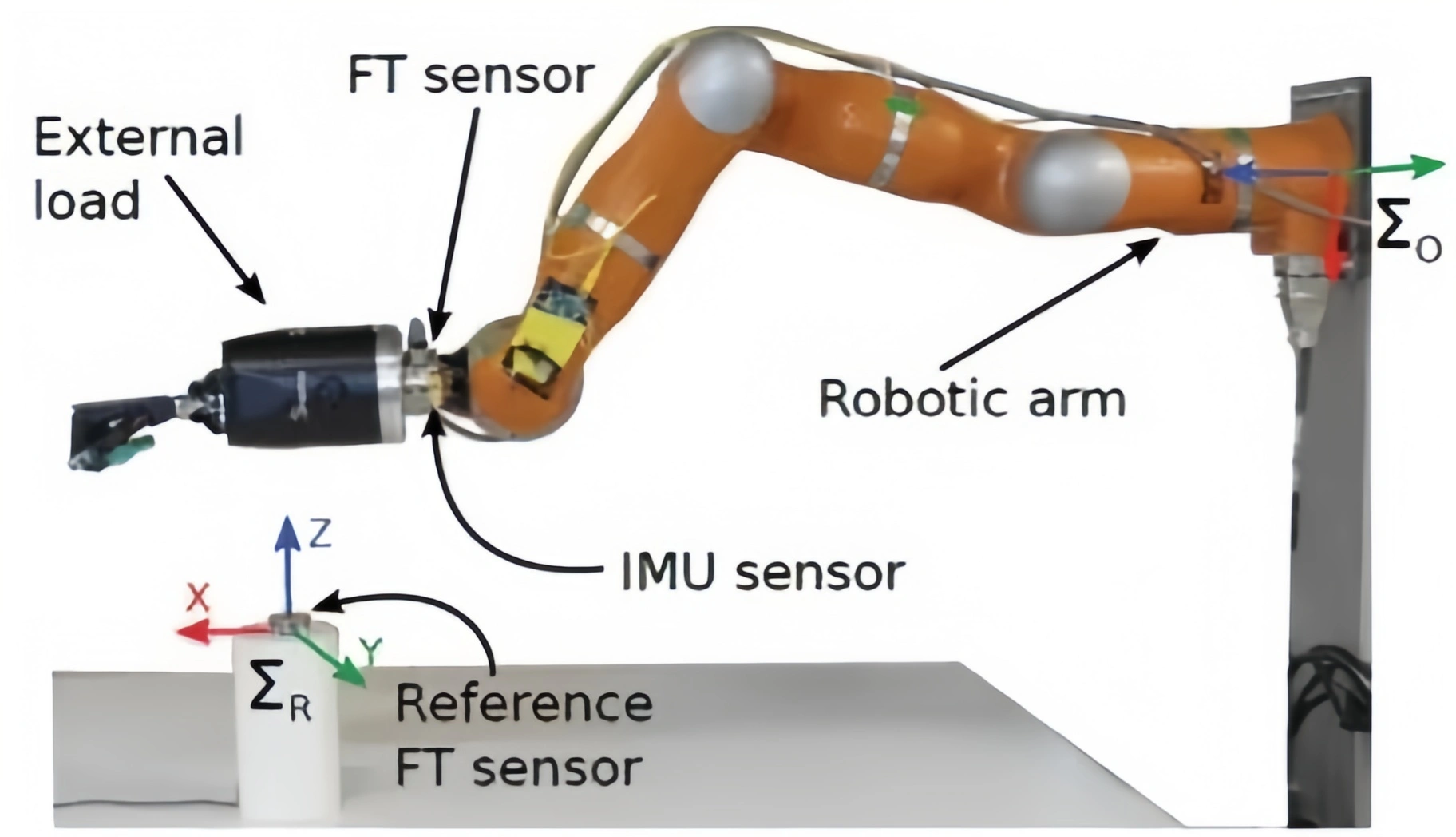
For robots, torque sensors primarily measure the force and torque exerted on the robot’s end effector when it comes into contact with the external environment. Torque sensors provide crucial force-sensing information for the robot’s force and motion control.
Torque sensors play a key role in robotics. Especially for intelligent robots, a robot’s sense of touch and force relies heavily on torque sensors.
Simply, torque sensors are used in robots in the following aspects:
- Enhancing operational accuracy
- Enhancing environmental adaptability
- Optimizing energy consumption.
- Improving perception capabilities
In short, torque sensors are of great significance in promoting the development and application of robotics.